The UCLA Astronomy Department operates a 24″Cassegrain telescope on the roof of the Math Sciences Annex building, on the UCLA campus.
A detailed description of the telescope and instruments was published in:
The UCLA 24-in Telescope and a Dual Optical-IR Imaging System Publications of the Astronomical Society of the Pacific109: 600-608, 1997 May
The 24″at Ojai

The UCLA 24″ telescope is one of at least two identical telescopes built at Cal Tech in 1964.
One telescope was placed on Mt. Wilson, where it is now being used for remote observing. The UCLA telescope was placed on a hilltop site in Ojai, California.

The 24″ served the Department until 1981, when the owners of the Ojai property asked the University to remove the telescope.
The 24″ in the UCLA dome.
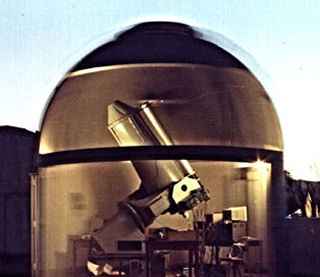
The “transparent” effect was archived by opening the dome shutter and doors, turning on the lights and letting the dome rotate roughly 180 degrees. This film exposure was about 30 seconds long.
Comet Hale-Bopp above the UCLA dome.

This picture was taken in May, 1997; the original print shows the Pleiades on the left edge of the frame. The ring to the right of the dome is courtesy of the film developers.
The telescope and its instruments
The 24″ is a Cassegrain type all reflective telescope, with a 24″ clear aperture f3.5 paraboloid primary and a 6″ diameter hyperboloid secondary. The effective focal length is 384.1″ (f/16.0). The telescope carries two permanent instruments:
A CCD camera (not shown) equipped with B V R I and clear filters at the Cassegrain focus.

Kcam-III – A 2.2u Infrared Camera is mounted on the East Dec axis port. Kcam uses a cryogenically cooled 256 x 256 pixel Rockwell NICMOS III HgCdTe detector. A 2.2µ filter inside the dewar limits Kcam to the K band and gives it its name. A dichroic mirror in the return optical path from the Cassegrain secondary reflects light above 0.9 microns to Kcam while allowing most of the light below 0.9 microns to pass through to the Cass focus and the CCD. On the 24″, Kcam has a plate scale of about 0.85″/pixel.
KCam-III has been modified and a motorized filter wheel and new optics have been added by James Larkin, Ph.D. The modified KCam has been used at Keck. When away, KCam’s place is taken up by a counterweight and RockCam…a cardboard box full of pebbles that approximates the weight of KCam and its electronics.
Cleaning the optics
Cleaning the optics of this telescope presented some challenges. While the 6″ secondary – protected by its long baffle tube – was very clean, the primary was a different story. Even though the telescope tube has a dust cover, the earthquake and the extensive campus repairs and construction that followed had coated the primary with a thick layer of dust. One of my major concerns had been the sandblasting work done on Powell Library; I could see clouds of fine dust drifting towards our building, and on close inspection, I could see that some of it had managed to land on the primary.
Cleaning the primary by washing it was clearly out; not only would handling a wet, 300lb Pyrex mirror present some interesting challenges, I could just picture those sharp edged sand grains leaving long scratches in the aluminum coating as they washed off.
I contacted Thomas Waineo, a retired master optician (now deceased) on CompuServe, and he was kind enough to send me a small jar of 3M Strippable Coating. The 3M liquid is no longer available, but it’s essentially Collodion. I taped a strip of paper around the outer edge of the primary and another along the edge of the central perforation, and slowly poured the 3M Strippable coating evenly over the surface. I used a very clean camel hair brush to distribute the viscous liquid, taking care not to touch the surface of the mirror with the brush hairs. The only difficulty I encountered was the smell of the solvent as it evaporated from the coating. This is a job that must be done in a well ventilated room, away from open flames, sparks and other localized heat sources!
By the next day, the 3M Strippable Coating had dried into a clear flexible skin. I used some masking tape to peel the skin off of the mirror. The results were amazing; I ended up with a translucent donut of dried coating and a very clean mirror. The coating felt like 400 – 600 grade sandpaper, and you could see all the grit and dust trapped in the coating.
The strippable coating didn’t get rid of all the dirt and oils, but what was left was easily taken care of by rinsing the mirror with isopropyl alcohol followed by several rinses with distilled water and blotting dry with very clean, lint free cotton rags. I let the water drain through the central hole and into a bucket under the mirror cell. The mirror was left dust and oil free, with no new scratches or damage to the coating.
This Google search for collodion mirror cleaning should provide enough links on how to use collodion to clean mirrors, and where to buy it.
Electronics and software
The AC motors and drive electronics were replaced by two small stepper motors and 5:1 gear reducers. Each stepper motor was originally driven by a 10 microstep/step driver from Oregon Microsystems (OMS). Before leaving Astronomy, I replaced the original drivers with IMS (Intelligent Motion Systems) 804 microsteppingdrivers. The new drivers are smaller, more efficient and allow greater microstepping ratios, down to 256 microsteps per step. The new drivers will allow us to use a higher microstepping ratio during tracking, which should eliminate all the vibrations caused by the RA stepper motor. Since the microstepping ratio can be changed on the fly, it can be increased during slewing. The microstepping drivers are in turn controlled by two Cybernetic Micro Systems CY545 stepper motor controller ICs. The CY545s do the acceleration/deceleration ramps and an Intel 8254 Programmable Timer handles the RA tracking rate. The CY545s, Motorola MC 6821 parallel port, Intel I8254 programmable timer, control PAL (Programmable Array Logic) , address decoding and bus buffering ICs are built on a small 8 bit PC expansion card and placed in an old Leading Edge PC. The schematics and parts list are available on request.
Since the acceleration ramps required for slewing are handled by the CY545s, the telescope control software (written in Turbo Pascal) is greatly simplified. Tracking is done by the Intel 8254 timer, which acts as a free running oscillator at the selected tracking rate. A PAL is used to select between tracking and slewing, directing the appropriate step pulses to the RA driver.
Most of the software, which has grown and been modified as we gain experience with the telescope, is concerned with keeping track of time and the telescope’s position. I wrote the CY545 control code and the rudimentary beginnings of the telescope control and pointing program, but much of the remaining code was written by and with the help of Brant Nelson, who received his Ph.D in 1997.
Updated August 5, 2020